
Manuel transmission - robotgearkasse
Indhold
Enhver moderne bil kan ikke starte og bevæge sig problemfrit, hvis der ikke er nogen transmission i enheden. I dag er der en bred vifte af alle slags gearkasser, som ikke kun giver føreren mulighed for at vælge den mulighed, der passer til hans materielle muligheder, men også gøre det muligt at få maksimal komfort ved at køre et køretøj.
Kort om de vigtigste transmissionstyper er beskrevet i separat gennemgang... Lad os nu snakke mere detaljeret om, hvad en robotgearkasse er, dens vigtigste forskelle fra en manuel gearkasse, og også overveje driftsprincippet for denne enhed.
Hvad er en robot gearkasse
Gearkassens funktion er næsten identisk med den mekaniske analog med undtagelse af nogle funktioner. Robotens enhed indeholder mange dele, der udgør den mekaniske version af kassen, der allerede er kendt for alle. Hovedforskellen mellem robotten er, at dens kontrol er af en mikroprocessortype. I sådanne gearkasser udføres gearskift af elektronik baseret på data fra motorens sensorer, gaspedal og hjul.

En robotboks kan også kaldes en automatisk maskine, men dette er et forkert navn. Faktum er, at automatisk transmission ofte bruges som et generaliserende koncept. Så den samme variator har en automatisk tilstand til at skifte gearforhold, så for nogle er det også en automatisk. Faktisk med hensyn til struktur og driftsprincip er robotten tættere på en mekanisk kasse.
Udadtil er det umuligt at skelne mellem automatisk transmission og manuel transmission, fordi de kan have en identisk vælger og karrosseri. Du kan kun kontrollere transmissionen, mens køretøjet kører. Hver enhedstype har sine egne egenskaber ved arbejde.
Hovedformålet med en robot transmission er at gøre kørslen så let som muligt. Føreren behøver ikke at skifte gear alene - dette arbejde udføres af kontrolenheden. Ud over komfort stræber producenterne af automatisk transmission efter at gøre deres produkter billigere. I dag er robotten den mest budgetmæssige type gearkasse efter mekanik, men den giver ikke sådan kørekomfort som en variator eller automatisk.
Princippet om en robot gearkasse
Robottransmission kan skifte til næste hastighed enten automatisk eller halvautomatisk. I det første tilfælde modtager mikroprocessorenheden signaler fra sensorerne, på basis af hvilke algoritmen, der er programmeret af producenten, udløses.
De fleste gearkasser er udstyret med en manuel vælger. I dette tilfælde tænder hastighederne stadig automatisk. Det eneste er, at føreren uafhængigt af hinanden kan signalere tidspunktet for at tænde for et op- eller nedadgående gear. Nogle automatiske transmissioner af typen Tiptronic har et lignende princip.
For at øge eller mindske hastigheden bevæger føreren vælgerhåndtaget mod + eller mod -. Takket være denne mulighed kalder nogle mennesker denne transmission sekventiel eller sekventiel.
Robotboksen fungerer i henhold til følgende skema:
- Føreren aktiverer bremsen, starter motoren og bevæger kørefunktionsomskifteren til position D;
- Signalet fra enheden går til boksens styreenhed;
- Afhængigt af den valgte tilstand aktiverer styreenheden den passende algoritme, i henhold til hvilken enheden skal fungere;
- Under bevægelsesprocessen sender sensorerne signaler til "robotens hjerne" om køretøjets hastighed, om belastningen på kraftenheden såvel som om den aktuelle gearkassetilstand;
- Så snart indikatorerne ophører med at svare til det program, der er installeret fra fabrikken, giver kontrolenheden kommandoen til at skifte til et andet gear. Dette kan enten være en stigning eller et fald i hastighed.
Når en chauffør kører en bil med mekanik, skal han mærke sit køretøj for at bestemme det øjeblik, hvornår han skal skifte til en anden hastighed. I en robotanalog finder en lignende proces sted, kun føreren behøver ikke at tænke på, hvornår man skal flytte gearstangen til den ønskede position. I stedet gør mikroprocessoren det.
Systemet overvåger alle oplysninger fra alle sensorer og vælger det optimale gear til en bestemt belastning. For at elektronikken kan skifte gear, har transmissionen en hydromekanisk aktuator. I en mere almindelig version er der i stedet for hydromekanik installeret et elektrisk drev eller et servodrev, der forbinder / afbryder koblingen i kassen (forresten har dette nogle ligheder med den automatiske gearkasse - koblingen er ikke placeret, hvor den er i den manuelle transmission, nemlig nær svinghjulet, men i selve huset smitte).
Når styreenheden giver et signal om, at det er tid til at skifte til en anden hastighed, aktiveres det første elektriske (eller hydromekaniske) servodrev først. Det frakobler koblingsfriktionsfladerne. Den anden servo flytter derefter gearene i mekanismen til den ønskede position. Så frigiver den første langsomt koblingen. Dette design gør det muligt for mekanismen at arbejde uden chaufførens deltagelse, derfor har en maskine med en robotgearkasse ikke en koblingspedal.

Mange vælgerbokse har tvungne gearpositioner. Denne såkaldte tiptronic giver føreren mulighed for uafhængigt at styre øjeblikket for skift til en højere eller lavere hastighed.
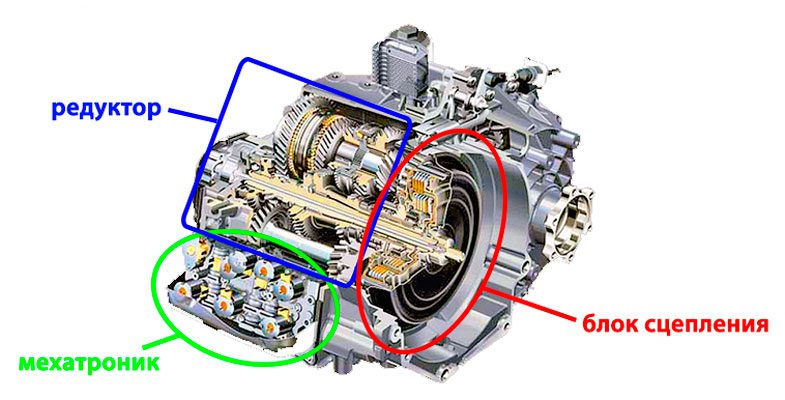
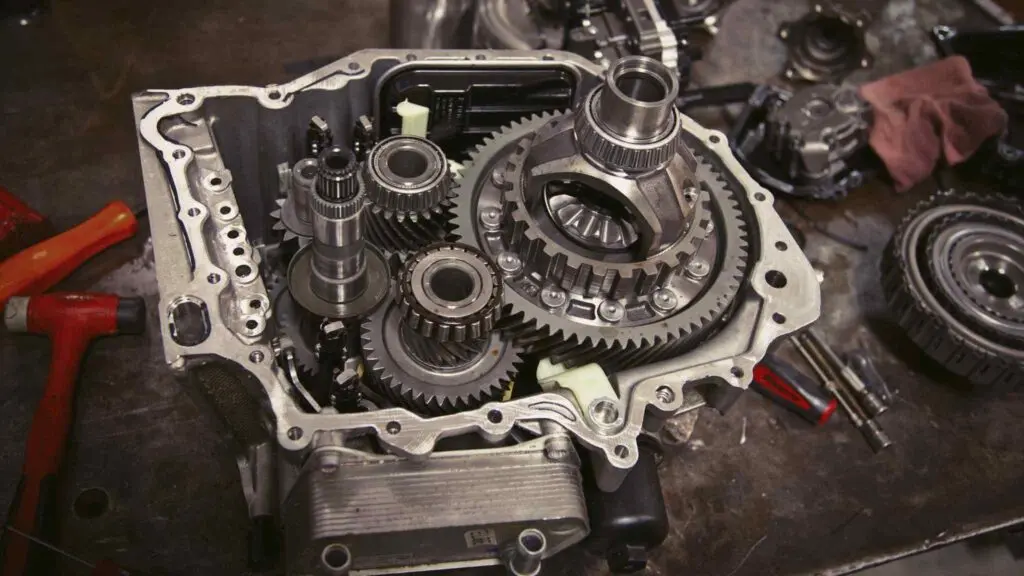
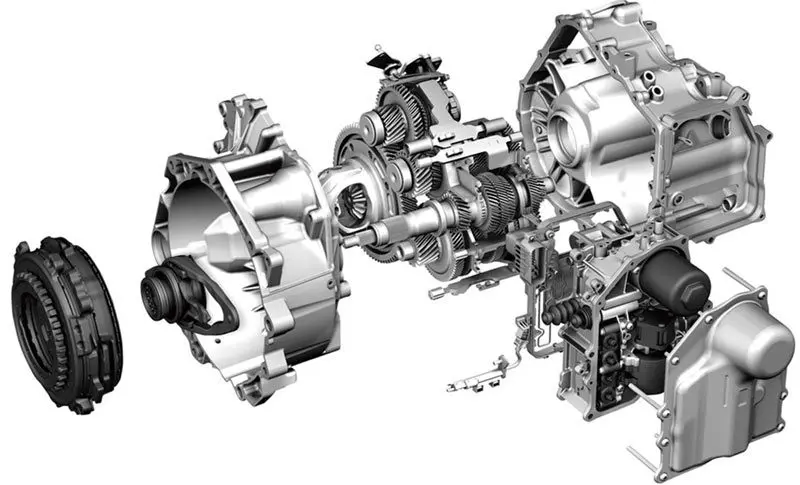
Robot gearkasse enhed
I dag er der flere typer robottransmissioner til personbiler. De kan afvige fra hinanden i nogle aktuatorer, men hoveddelene forbliver identiske.
Her er de noder, der er inkluderet i gearkassen:
- Kobling. Afhængigt af producenten og modifikationen af enheden kan dette være en del med en friktionsoverflade eller flere lignende diske. Oftest er disse elementer placeret i kølemidlet, hvilket stabiliserer enhedens drift og forhindrer den i at blive overophedet. Den forvalgte eller dobbelte mulighed betragtes som mere effektiv. Mens et gear er tilkoblet, forbereder det andet sæt sig i denne ændring på at tænde for næste hastighed.
- Hoveddelen er en konventionel mekanisk kasse. Hver producent bruger forskellige proprietære designs. For eksempel er en robot fra Mercedes-mærket (Speedshift) internt en 7G-Tronic automatgear. Den eneste forskel mellem enhederne er, at der i stedet for en momentomformer bruges en kobling med flere friktionsskiver. BMW har en lignende tilgang. Dens SMG-gearkasse er baseret på en seks-trins manuel gearkasse.
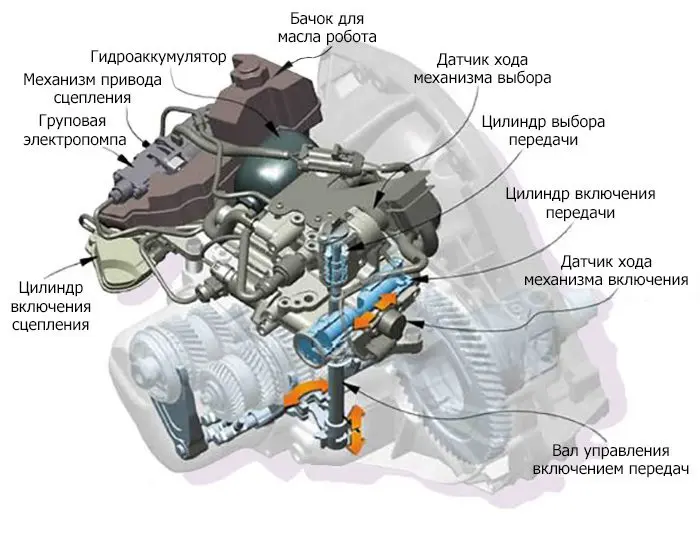
- Kobling og transmission drev. Der er to muligheder - med et elektrisk drev eller en hydromekanisk analog. I det første tilfælde presses koblingen ud af en elektrisk motor og i det andet - af hydrauliske cylindre med EM-ventiler. Det elektriske drev fungerer langsommere end hydraulikken, men det kræver ikke vedligeholdelse af konstant tryk i ledningen, hvorfra den elektrohydrauliske type fungerer. Den hydrauliske robot bevæger sig meget hurtigere til næste trin (0,05 sekunder mod 0,5 sekunder for den elektriske analog). En elektrisk gearkasse er hovedsageligt installeret på budgetbiler, og en hydromekanisk gearkasse er installeret på premium sportsbiler, da gearskiftehastighed er ekstremt vigtig i dem uden at afbryde strømforsyningen til drivakslen.

- Sensor. Der er mange sådanne dele i robotten. De overvåger mange forskellige parametre for transmissionen, for eksempel gaflenes position, omdrejningerne på input- og outputakslerne, i hvilken position vælgerkontakten er låst, kølevæskens temperatur osv. Al denne information tilføres mekanismen til kontrolenheden.
- ECU er en mikroprocessorenhed, hvor forskellige algoritmer er programmeret med forskellige indikatorer, der kommer fra sensorer. Denne enhed er tilsluttet hovedkontrolenheden (derfra kommer data om motordrift) samt til elektroniske hjullåsesystemer (ABS eller ESP).
- Aktuatorer - hydrauliske cylindre eller elektriske motorer afhængigt af ændringen af kassen.
Specifikationerne for RKPP's arbejde
For at køretøjet kan starte jævnt, skal føreren bruge koblingspedalen korrekt. Når han har inkluderet første eller bagudgående gear, skal han frigøre pedalen let. Når føreren har en fornemmelse for indgreb af skiverne, når han slipper pedalen, kan han tilføje omdrejninger til motoren, så bilen ikke går i stå. Sådan fungerer mekanik.
En identisk proces forekommer i robotmodstykket. Kun i dette tilfælde kræves der ikke en stor færdighed fra føreren. Han behøver kun at flytte boksekontakten til den rette position. Bilen begynder at bevæge sig i overensstemmelse med indstillingerne for kontrolenheden.

Den enkleste enkeltkoblingsmodifikation fungerer ligesom klassisk mekanik. Men på samme tid er der et problem - elektronikken registrerer ikke koblingsfeedback. Hvis en person er i stand til at bestemme, hvor glat det er nødvendigt at frigøre pedalen i et bestemt tilfælde, fungerer automatiseringen mere stift, så bilens bevægelse ledsages af håndgribelige ryk.
Dette mærkes især i ændringer med et elektrisk drev fra aktuatorerne - mens gearet skifter, vil koblingen være i åben tilstand. Dette vil betyde en pause i drejningsmomentet, som bilen begynder at bremse. Da hjulens rotationshastighed allerede er mindre konsistent med det tilkoblede gear, opstår der en let ryk.
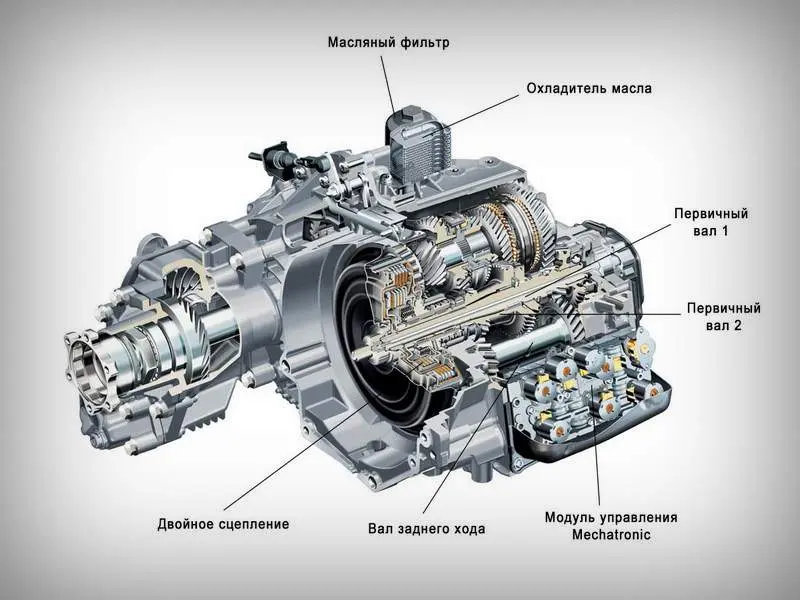
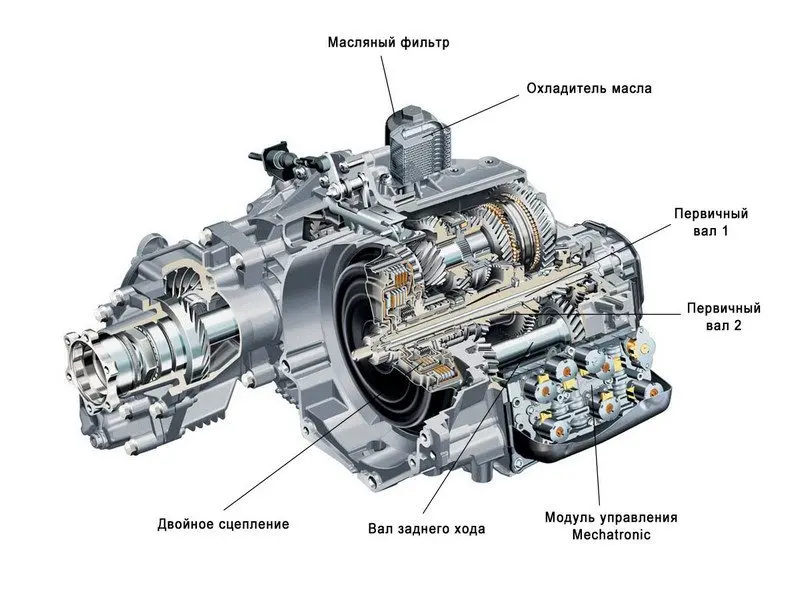
En innovativ løsning på dette problem var udviklingen af en dobbeltkoblingsmodifikation. En slående repræsentant for en sådan transmission er Volkswagen DSG. Lad os se nærmere på dens funktioner.
Funktioner i DSG robot gearkasse
Forkortelsen står for direkte gearkasse. Faktisk er dette to mekaniske kasser installeret i et hus, men med et forbindelsespunkt til maskinens chassis. Hver mekanisme har sin egen kobling.
Hovedfunktionen ved denne ændring er den forvalgte tilstand. Det vil sige, at mens den første aksel kører med gearet i indgreb, forbinder elektronikken allerede de tilsvarende gear (når de accelererer for at øge gearet, når det aftager til det nedre) af den anden aksel. Hovedaktuatoren behøver kun at afbryde en kobling og tilslutte en anden. Så snart der modtages et signal fra styreenheden om at skifte til et andet trin, åbnes arbejdskoblingen, og den anden med allerede gearede gear er straks forbundet.
Dette design giver dig mulighed for at køre uden stærke ryk, når du accelererer. Den første udvikling af en preselektiv modifikation dukkede op i 80'erne i det sidste århundrede. Sandt nok blev robotter med dobbelt kobling installeret på rally- og racerbiler, hvor hastighed og nøjagtighed ved gearskift er af stor betydning.
Hvis vi sammenligner DSG-boksen med en klassisk automatik, har den første mulighed flere fordele. For det første på grund af den mere velkendte struktur af hovedelementerne (producenten kan tage enhver færdiglavet mekanisk analog som basis), vil en sådan kasse være billigere til salg. Den samme faktor påvirker vedligeholdelsen af enheden - mekanikken er mere pålidelig og lettere at reparere.
Dette gjorde det muligt for producenten at installere en innovativ transmission på budgetmodeller af deres produkter. For det andet bemærker mange ejere af køretøjer med en sådan gearkasse en stigning i bilens økonomi sammenlignet med en identisk model, men med en anden gearkasse.
Ingeniørerne fra VAG-koncernen har udviklet to varianter af DSG-transmissionen. En af dem er mærket 6, og den anden er 7, hvilket svarer til antallet af trin i feltet. En seks-trins automatik bruger også en våd kobling, og en syv-trins analog bruger en tør kobling. For mere information om fordele og ulemper ved DSG-boksen samt hvordan ellers DSG 6-modellen adskiller sig fra den syvende ændring, se separat artikel.
Fordele og ulemper
Den betragtede transmissionstype har både positive og negative sider. Fordelene ved kassen inkluderer:
- En sådan transmission kan bruges sammen med en kraftenhed med næsten enhver effekt;
- Sammenlignet med en variator og en automatisk maskine er robotversionen billigere, selvom dette er en ret innovativ udvikling;
- Robotter er mere pålidelige end andre automatiske transmissioner;
- På grund af den interne lighed med mekanik er det lettere at finde en specialist, der påtager sig reparationen af enheden;
- Mere effektiv gearskift muliggør brug af motorkraft uden en kritisk stigning i brændstofforbrug;
- Ved at forbedre effektiviteten udsender maskinen mindre skadelige stoffer i miljøet.
På trods af de klare fordele i forhold til andre automatiske transmissioner har robotten flere betydelige ulemper:
- Hvis bilen er udstyret med en enkeltdisk-robot, kan turen på et sådant køretøj ikke kaldes behagelig. Når du skifter gear, vil der være håndtag, som om føreren pludselig kaster koblingspedalen på mekanikken.
- Koblingen (mindre glat ved indgreb) og aktuatorerne fejler oftest i enheden. Dette komplicerer reparationen af transmissioner, da de har en lille arbejdsressource (ca. 100 tusind kilometer). Servoer kan sjældent repareres, og nye mekanismer er dyre.
- Med hensyn til koblingen er diskressourcen også meget lille - omkring 60 tusind. Desuden er det omtrent halvdelen af ressourcen nødvendigt at udføre "forbindelsen" af kassen under betingelse af delens friktionsoverflade.
- Hvis vi taler om den forudvalgte ændring af DSG, viste det sig at være mere pålidelig på grund af mindre tid til skiftehastighed (takket være dette sænker bilen ikke så meget). På trods af dette lider vedhæftningen stadig i dem.
Under hensyntagen til de anførte faktorer kan vi konkludere, at hvad angår pålidelighed og arbejdsliv, er mekanik endnu ikke lige. Hvis der lægges vægt på maksimal komfort, er det bedre at vælge en variator (hvad er dens egenart, læs her). Man skal huske på, at en sådan transmission ikke giver mulighed for at spare brændstof.
Afslutningsvis tilbyder vi en kort videosammenligning af hovedtyperne af transmissioner - deres fordele og ulemper:

Spørgsmål og svar:
Hvad er forskellen mellem en automat og en robot? Automatgearet fungerer på bekostning af en momentomformer (der er ingen stiv kobling med svinghjulet gennem koblingen), og robotten er analog med mekanik, kun hastighederne skiftes automatisk.
Hvordan skifter man gear på en robotboks? Princippet om at køre en robot er identisk med at køre en automat: den ønskede tilstand vælges på vælgeren, og motorhastigheden reguleres af gaspedalen. Hastigheden skifter af sig selv.
Hvor mange pedaler er der i en bil med en robot? Selvom robotten strukturelt ligner en mekaniker, kobles koblingen automatisk fra svinghjulet, så en bil med robotgear har to pedaler (gas og bremse).
Hvordan parkerer man en bil korrekt med en robotkasse? Den europæiske model skal parkeres i A-tilstand eller i bakgear. Hvis bilen er amerikansk, så er der en P-tilstand på vælgeren.
En kommentar
David
Hej, jeg har brug for hjælp, 203 coupéer gik i nødtilstand, hvad kan jeg gøre?